


भारतीय प्रौद्योगिकी संस्थान भिलाई में एक्टिव माइक्रो एंड नैनो सिस्टम्स (एएमएन) लैब के डॉ. ध्रुव प्रताप सिंह के नेतृत्व में शोधकर्ताओं की एक टीम ने रॉड के आकार के सक्रिय पदार्थ प्रणालियों का एक नया वर्ग विकसित किया है, जो बाहरी प्रकाश स्रोतों द्वारा सक्रिय होने पर द्रव मीडिया में स्वायत्त गति करने में सक्षम है। दिलचस्प बात यह है कि ये फोटो-एक्टिव माइक्रोस्विमर्स निष्क्रिय कणों से भरे वातावरण के माध्यम से नेविगेट करते समय विविध और गतिशील तैराकी व्यवहार प्रदर्शित करते हैं। यह कृति हाल ही में एक प्रतिष्ठित पत्रिका ‘स्मॉल: विली-वीसीएच’ में प्रकाशित हुई है (https://doi.org/10.1002/smll.202410997).



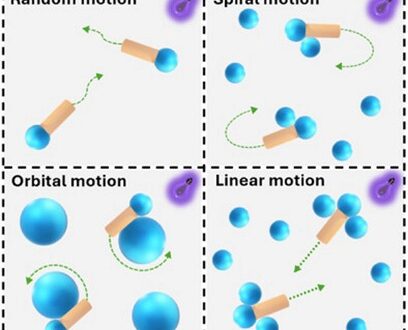
प्रयोगशाला में पीएचडी छात्र शुभेंदु कुमार पांडा ने इस परियोजना के एक प्रमुख शोधकर्ता के रूप में काम किया, उनका काम इस बात की जांच करता है कि इन सूक्ष्म तैराकों के तैराकी पैटर्न को उनके शरीर के साथ अलग-अलग संख्या और आकार के निष्क्रिय कणों के लगाव के कारण कैसे संशोधित किया जा सकता है। उल्लेखनीय रूप से, इन निष्क्रिय कणों की उपस्थिति तैराकों की गति को महत्वपूर्ण रूप से बदल देती है, जिससे सर्पिल गति, रैखिक प्रणोदन और कक्षीय या परिपत्र प्रक्षेपवक्र जैसे पेचीदा बहुआयामी व्यवहार होते हैं।
यह कार्य भीड़-भाड़, विषम मीडिया में सक्रिय-निष्क्रिय इंटरैक्शन की भूमिका पर प्रकाश डालता है और माइक्रो/नैनोरोबोटिक्स में प्रगति का मार्ग भी प्रशस्त करता है। इन प्रकाश-चालित तैराकों की अपनी गति और परिवहन निष्क्रिय कार्गो को अनुकूलित करने की क्षमता माइक्रोफ्लुइडिक सिस्टम के अंदर लक्षित दवा वितरण और कार्गो हेरफेर में भविष्य के अनुप्रयोगों के लिए बहुत अच्छा वादा करती है।
शरीर में किसी भी बीमारी का पता लगाने के लिए कई तरह की जांच से गुजरना होता है। इसमें समय और धन दोनों खर्च होते हैं। इसी प्रक्रिया को सरल और सस्ती करने के नजरिए से आईआईटी भिलाई फिजिक्स डिपार्टमेंट के असिस्टेंट प्रोफेसर ध्रुवप्रताप सिंह ने एक खोज की है। उन्होंने माइक्रो रोबोट का प्रोटोटाइप मॉडल तैयार किया है। इसकी खासियत यह कि बॉडी के किसी भी हिस्से में जाकर सेंस कर सकता है और चाही गई जानकारी फौरन जुटा सकता है। रिसर्च टीम में रिसर्च स्कॉलर श्रीकांत देवता और सुवेंदु कुमार पांडा शामिल हैं जिन्हें ध्रुवप्रताप लीड कर रहे हैं।
ध्रुवप्रताप बताते हैं, बॉडी में कैंसर सेल्स या ट्यूमर सेल्स को डायग्नोस करने उस हिस्से का सेंपल लेना पड़ता है। यह कठिन और समय लेने वाली प्रक्रिया है। बॉडी में कई तरह के पार्ट होते हैं। कुछ हिस्से अलग-अलग केमेस्ट्री में रिएक्शन कर रहे होते हैं। इन्हें लॉर्ज वॉल्यूम में सेंस करने का काम माइक्रो रोबो करेगा।
छोटी लोकेशन भी टारगेट पॉइंट
इस मॉडल की खास बात बॉडी के छोटी से छोटी लोकेशन को टारगेट करना है। बॉडी में हो रहे बदलाव को सेंस करके सिग्नल मिलने से न सिर्फ बीमारी को जल्द से जल्द पहचाना जा सकेगा बल्कि इलाज की प्रक्रिया भी जल्दी शुरू की जा सकेगी।
डेढ़ साल से चल रहा काम
ध्रुवप्रताप ने बताया, इस मॉडल पर डेढ़ साल से रिसर्च चल रही है। माइक्रो रोबो पर पहले भी काम करते रहे हैं। उस वक्त हमने बैक्टीरिया और सेल्स को इंट्रैक्ट करने का काम किया था। उसी दौरान उसी दौरान लगा कि इसे सेंस भी कर सकते हैं। इसके प्रेजेंस को देखने के लिए फंक्शनल मेटेरियल की कोटिंग कर रिसर्च शुरू किया। हालांकि हम अभी बॉडी तक नहीं पहुंचे हैं। हमने ट्यूमर और कैंसर सेल्स कॉ मॉडल बनाकर लैब में उसी साइज के वॉल्यूम और रेशियों में जेनेरेट किया।
स्टार्ट पॉइंट में माइक्रो रोबो
डाइग्राम में दिखाई दे रहा है कि स्टार्ट पाइंट में माइक्रो रोबोट की एंट्री हुई है। शुरुआती तौर पर सिग्नल कमजोर है इसलिए पीएच भी वीक है। माइक्रो रोबो को आर्टिफिशियल सेल्स तक और उसके बाद फाइरल पॉइंट तक ले जाया गया जहां सिग्नल हाई मिला और पीएच भी हाई लेवल तक पहुंच गया।
